For nearly seven decades, innovators and researchers have tirelessly worked to create robots that can effectively perform tasks across various sectors, from manufacturing to healthcare. Traditionally, these machines have relied on motors—an established technology with a history dating back two centuries. While motorized robots have significantly advanced productivity, they still struggle with one significant limitation: mobility. Unlike biological systems of movement found in animals and humans, motor-driven robots often lack the adaptive capabilities required for complex environments. In a groundbreaking development, researchers have introduced a new prototype of a robotic leg that utilizes musculoskeletal systems inspired by nature, demonstrating enhanced efficiency and agility.
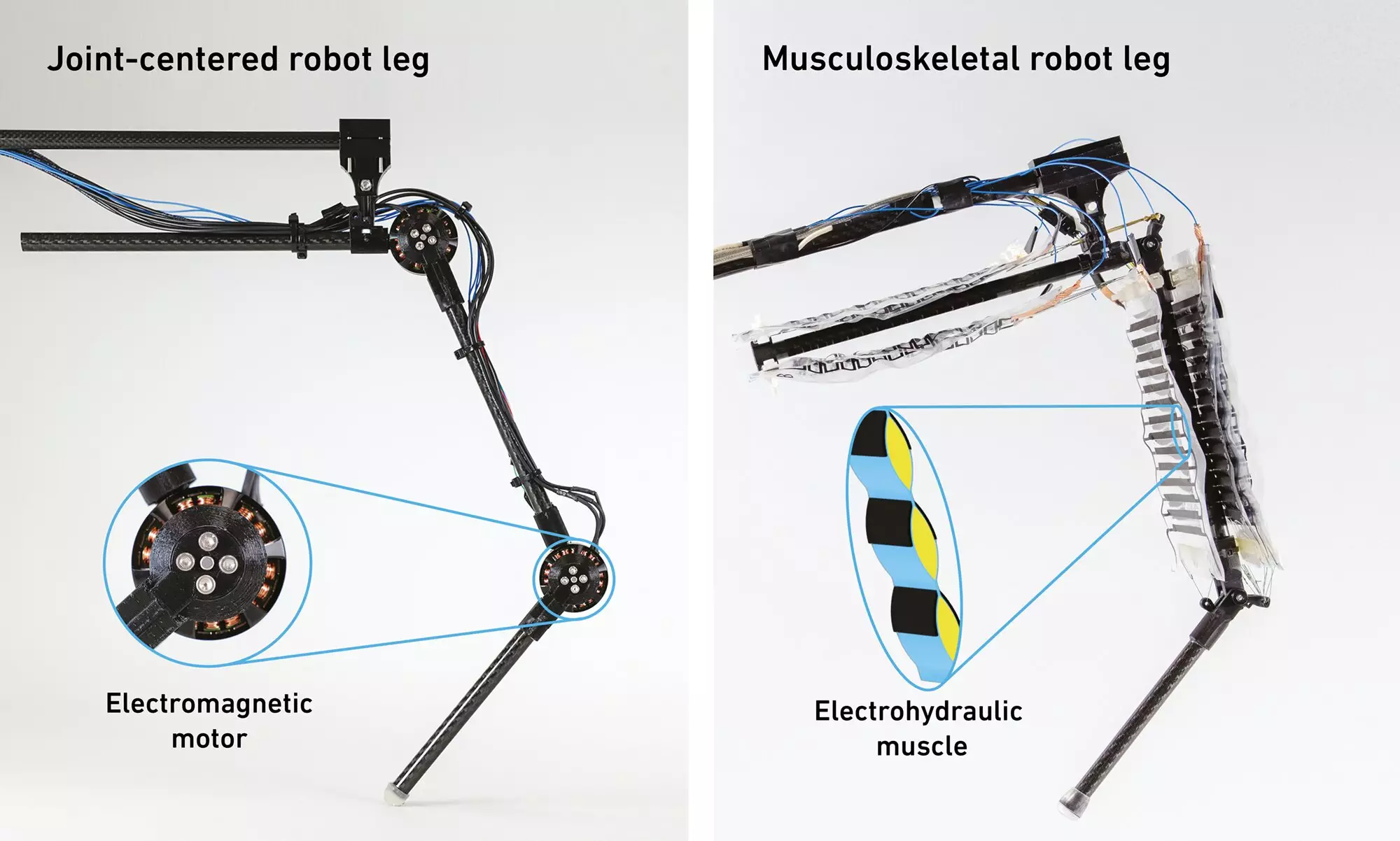
The novel muscle-powered robotic leg developed by a collaborative team from ETH Zurich and the Max Planck Institute for Intelligent Systems has set a new precedent in robotics. This initiative, under the Max Planck ETH Center for Learning Systems, involves leading researchers Robert Katzschmann and Christoph Keplinger, supported by doctoral students Thomas Buchner and Toshihiko Fukushima. Their work, recently highlighted in *Nature Communications*, showcases an innovative design that integrates mechanisms similar to biological muscles. By employing electro-hydraulic actuators, termed HASELs, this robotic leg mimics the function of both extensor and flexor muscles, allowing it to achieve movements similar to living creatures.
The mechanics of the new robotic leg entail oil-filled plastic bags functioning as actuators, which contract and expand based on changes in voltage applied to conductive electrodes. This ingenious design mirrors the actions of human muscles, where pairs of muscles work in tandem—when one contracts, the other elongates. The hydraulic system’s efficiency lies in its ability to minimize unnecessary energy conversion into heat, a common drawback of traditional motor-driven systems. This contrast reveals a significant advantage: the electro-hydraulic leg retains a consistent temperature, eliminating the need for cumbersome cooling systems typically associated with electric motors.
Another striking feature of this robotic leg is its remarkable adaptability. Unlike conventional robotic systems that require intricate sensors to monitor and adjust positions, the muscle-powered leg responds intuitively to environmental variations. With just two simple input signals—one for bending and another for extending—the leg can adjust its movements based on the terrain it encounters. This capability draws a direct parallel to human mechanics; for instance, we instinctively determine the appropriate angle to bend our knees upon landing from a jump without the need for conscious thought.
The importance of this adaptability can’t be understated. As noted by Katzschmann, flexibility in a musculoskeletal framework is essential for successfully navigating uneven surfaces—an ability fundamental to many biological creatures. The research team’s findings suggest that such an adaptive system could drastically improve how robots execute complex maneuvers in unpredictable environments.
Despite these promising advancements, the team acknowledges limitations in current designs. As Katzschmann eloquently summarized, while their robotic leg represents a step forward, it is attached to a stationary rod, preventing it from free movement. To fully realize the potential of muscle-powered robots, future developments must focus on overcoming these constraints. Enhancing locomotion capabilities will be vital in creating walking robots equipped with artificial muscles that can operate independently in real-world conditions.
The field of electrohydraulic actuators, being relatively nascent at only six years old, is rapidly evolving. This transformative research serves to remind us of robotics’ unbounded potential when new hardware paradigms are introduced. Notably, while it may be impractical to apply muscle-based robotics on a large scale in heavy machinery, instances where agility and precision are paramount—such as robotic grippers—present opportunities for practical applications.
The introduction of muscle-powered robotic legs represents an exciting frontier in the landscape of robotics. By breaking away from the limitations of traditional motor-based systems, this innovation demonstrates how nature-inspired mechanisms can enhance both functionality and adaptability. As researchers continue to refine these concepts, the promise of developing robots capable of sophisticated, efficient movement in diverse environments grows stronger. The vision of walking robots driven by artificial muscles could ultimately change the way robots interact with our world, paving the path for more intuitive, versatile machines. The quest for increasingly capable and autonomous robots is surely just beginning, and the work at ETH Zurich and MPI-IS is a vital contribution to this progressive narrative.