The advancement of soft robotics marks a significant shift in how we approach the design and functionality of robotic devices. One of the key components driving this innovation is the development of Fabric-Based Soft Pneumatic Actuators (FSPAs). Unlike traditional rigid robots, which can be cumbersome and limited in their applications, FSPAs are designed to be flexible and adaptive, allowing for safe interactions with humans and fragile objects. These actuators leverage pneumatic systems that inflate or deflate to produce movement or deformation, making them ideal for a myriad of applications ranging from wearable technology to robotic grippers in rehabilitation scenarios.
The flexibility and low weight of FSPAs offer enormous potential, but they also present a considerable challenge in terms of design and fabrication. The intricacies of achieving controlled movement and predictable deformation through conventional methods often necessitate extensive trial and error, consuming valuable time and resources.
Recent research published in Scientific Reports has unveiled a novel approach to address these challenges—utilizing Turing patterns, a concept originating from mathematician Alan Turing’s morphogenesis theory, to configure the design of FSPAs. In essence, Turing patterns describe the formation of intricate patterns in nature, such as the stripes on a zebra. These patterns are born from the interactions of two substances: one that promotes activity and another that inhibits it, resulting in static yet dynamic forms.
The research team, composed of experts from Toyota Central R&D Labs, Inc. and Toyota Motor Engineering & Manufacturing North America, sought to incorporate Turing patterns into the design of FSPAs. As Dr. Masato Tanaka pointed out, achieving controlled movements via simple mechanisms is crucial for the soft robotics community, especially in developing cost-effective solutions without the need for specialized materials.
Guided by Turing’s principles, the researchers leveraged a gradient-based orientation optimization method. This innovative technique enhances the design of the surface membranes of FSPAs by allowing for variations in material properties—creating anisotropic materials that have directional strengths. Anisotropy contrasts with the isotropic nature of traditional materials, which possess uniform properties and often lead to predictably limited movements.
To realize these patterns in a practical format, the team employed advanced computational modeling techniques, particularly nonlinear finite element methods, to optimize the orientation of the fabric fibers on the actuator surface. These patterns, informed by the mathematical frameworks of reaction-diffusion systems, are crucial in directing how the actuator will respond to compressive forces.
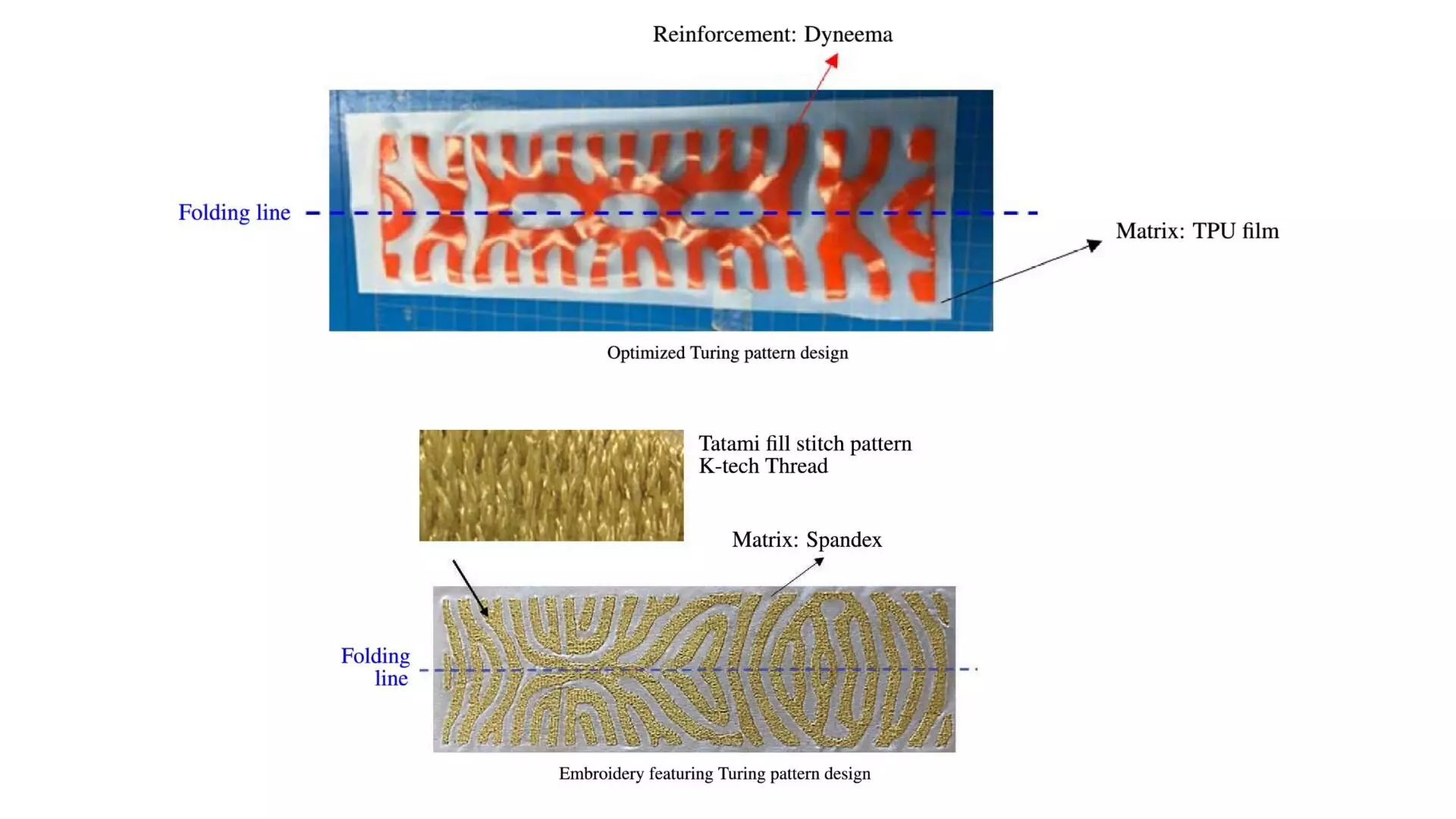
The subsequent challenge lay in transforming these optimized patterns into tangible structures. The research team explored two primary fabrication methods: heat bonding and embroidery. Heat bonding involves the precision layering of a rigid fabric cut to the Turing pattern and adhered to a softer substrate, enabling distinct capabilities and flexibilities. In contrast, embroidery allows for the direct integration of varied stiffness patterns into a soft material, giving rise to controlled movement patterns through carefully crafted zones.
Not only did the team aim for high performance with these novel actuators, but they also prioritized scalability and cost-effectiveness. Initial comparisons between Turing-patterned designs and conventional structures showed promising results. For instance, the Turing-patterned C-shaped designs demonstrated a roughly 10% reduction in actuator edge distance compared to traditional counterparts—a significant gain in efficiency.
The implications of this research extend far beyond merely improving the functionality of FSPAs. Future studies are projected to delve into integrating Turing patterns with cutting-edge materials, such as shape memory alloys or electroactive polymers, to further improve actuator dynamics. By optimizing the design and leveraging innovative materials, these researchers aim to pave the way for a new generation of actuators that are not only more efficient but can also respond dynamically to environmental stimuli.
Moreover, the potential for mass production through advanced techniques like 3D printing or automated weaving could tremendously scale the implementation of these sophisticated actuators, opening new pathways across various industries, including healthcare, manufacturing, and entertainment.
The incorporation of Turing patterns into the design of fabric-based soft pneumatic actuators signifies a noteworthy advancement in soft robotics. With the promise of enhanced capabilities, reduced costs, and innovative fabrication techniques, these actuators are set to revolutionize numerous applications, forever changing the landscape of robotic interaction. The ongoing research in this domain signals a bright future for intelligent, safe, and efficient robotic systems that can seamlessly integrate into our daily lives.