The elephant’s trunk stands as a testament to the incredible adaptability and functionality found in the natural world. This extraordinary appendage serves not just as a nose but as an all-in-one tool for survival, demonstrating a remarkable blend of strength and finesse. Comprised of 17 muscle groups and fueled by tens of thousands of muscle fibers, the trunk is not only a means of breathing and smelling but also a sophisticated instrument for grasping, manipulating, and even defending itself. Its design and capabilities have intrigued researchers for decades, each eager to unlock the secrets of its mechanics and find applications in technological advancement.
Recent findings that discuss reproducing the trunk’s dexterity using a simplified model serve as a prime example of how nature can inspire innovation. A research team from Stanford University and the University of Oxford has made strides in this direction, showcasing how an understanding of the elephant’s anatomy can significantly contribute to robotics. The insights gathered from the elephant trunk provide a broad canvas for exploring new dimensions in robotic limb design, proving that even in a field dominated by technology, there is much to learn from our natural counterparts.
Mathematics Meets Mechanics
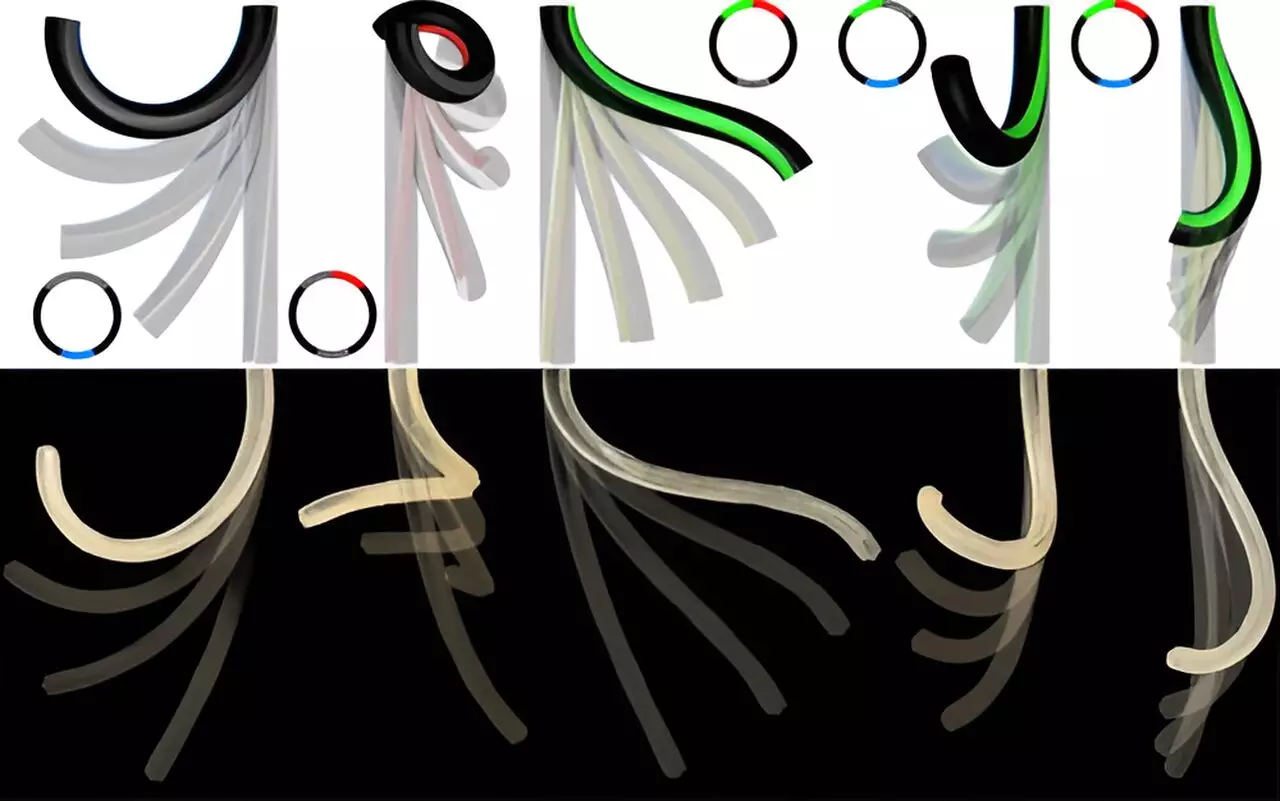
What stands out in the above research is the ambitious approach of constructing a mathematical model that mimics the elephant’s trunk with a minimalist design. By representing the trunk as a slender biological filament, the researchers managed to simulate the complex actions of contraction, torsion, and stretching with just three actuators. This innovative concept challenges traditional robotics, which often rely on more cumbersome armatures with multiple moving joints.
The decision to use helical and longitudinal actuators highlights a keen understanding of the physics governing the elephant trunk. While other designs often incorporate redundant systems, this streamlined approach emphasizes efficiency – a principle all too necessary in robotic design. The ability to generate diverse motion modes through opposing helical bundles raises interesting questions about not just mimicking nature but optimizing it for human use.
From Theory to Reality: A Soft Robotics Revolution
Transitioning from theory to practical application presents one of the greatest challenges in modern engineering. However, the successful development of a physical model using advanced materials highlights the potential of soft robotics. By employing 3D-printed liquid-crystalline elastomer fibers, this model can contract and mimic the movements of an elephant trunk. This breakthrough employs principles akin to how elephant trunks work, thus creating a synergy between biology and engineering.
What truly captivates the imagination is the flexibility and intricate control offered by this new trunk design. With each technological advancement, these models approach closer to the capabilities of their biological counterparts, blurring the lines between organic and synthetic. The potential for such technology in real-world applications, particularly in areas like assembly lines and hazardous environments, could revolutionize how tasks are automated, allowing robots not just to mimic human tasks but to excel at them through enhanced versatility.
The Reachability Cloud: Futuristic Implications
The notion of a “reachability cloud” adds an intriguing layer to understanding robotic movement. By evaluating how far and in what configurations this simplified trunk can operate, the researchers have set the stage for future explorations in the realm of robotics. The substantial volume of this cloud suggests that the minimal design can engage with its environment more dynamically than traditional robotic arms. This kind of adaptability is crucial as automation infiltrates sectors previously untouched by such technology.
Moreover, the drop in reachability when modifying the trunk design underscores the value of understanding biomechanical principles more deeply. The ability of an arm to perform complex manipulations mirrors that of the biological elephant trunk, indicating that the insights from this study might pave the way for intelligent motion planning tools that can avoid obstacles and delicately handle various objects – a need that is increasingly becoming paramount in an automated world.
Future Directions: Beyond Mimicking Nature
While this new design is a significant step towards enhanced robotic functionality, it does come with limitations that warrant further investigation. The trunk’s inability to elongate or shorten raises questions about how such designs can manage loads of varying weights and shapes. Developing an articulate, flexible limb that truly matches the nuanced capabilities of an elephant trunk demands not just replication of its mechanics, but a deeper evolution of robotic limbs in general.
Organically inspired by nature, this research represents not just an enhancement in robotics but a challenge to rethink our approach to technology. By continuously exploring the marvels of biological structures, we can drive innovation that respects the intricacies of evolved forms. In this ever-shifting interplay between nature and technology, the elephant’s trunk may just be the beginning of a broader conversation about the power of adaptive design.